источник статьи:
Большая Советская
Энциклопедия
Большая Советская
Энциклопедия
|
|
|
|
источник статьи: Большая Советская Энциклопедия |
|
Кинематическая пара, подвижное сопряжение двух твёрдых звеньев, налагающее ограничения на их относительное движение условиями связи. Каждое из условий связи устраняет одну степень свободы, то есть возможность одного из 6 независимых относительных движений в пространстве. В прямоугольной системе координат возможно 3 поступательных движения (в направлении 3 осей координат) и 3 вращательных (вокруг этих осей). По числу условий связи S К. п. делятся на 5 классов. Число степеней свободы К. п. W=6 —S. Внутри каждого класса К. п. делятся на виды по оставшимся возможным относительным движениям звеньев. По характеру соприкосновения звеньев выделяют низшие К. п. — с контактом по поверхностям, и высшие — с контактом по линиям или в точках. Высшие К. п. возможны всех 5 классов и многих видов; низшие — только 3 классов и 6 видов (рис.1). Различают также геомет рически замкнутые и незамкнутые К. п. В первых постоянное соприкосновение поверхностей обеспечивается формой их элементов (например, все К. п. на рис. 1), во вторых — для замыкания требуется прижимающая сила, т. н. силовое замыкание (например, в кулачковом механизме). Условно к К. п. относят некоторые подвижные сопряжения с несколькими промежуточными телами качения (например, шарико- и роликоподшипники) и с промежуточными деформируемыми элементами (например, так называемые безлюфтовые шарниры приборов с плоскими пружинами; рис. 2).
Лит. см. при ст. Машин теория. Н. Я. Ниберг. 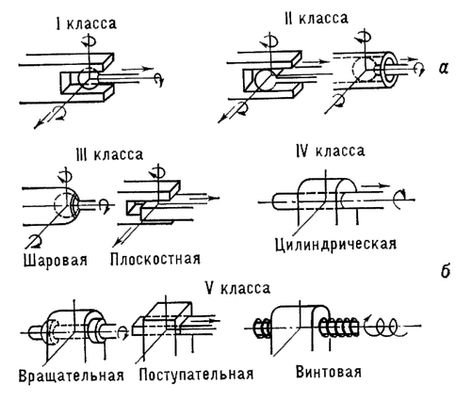 Рис. 1. Кинематические пары: а — высшие, б — низшие. 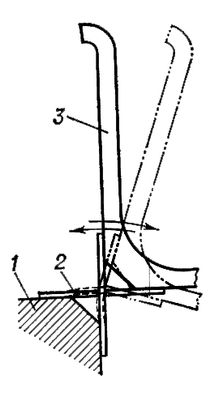 Рис. 2. Схема безлюфтового шарнира: 1 — неподвижная деталь; 2 — деформируемые элементы (плоские пружины); 3 — рычаг. |