источник статьи:
Большая Советская
Энциклопедия
Большая Советская
Энциклопедия
|
|
|
|
источник статьи: Большая Советская Энциклопедия |
|
Гироскопический интегратор, гироскопическое устройство, содержащее т. и. интегрирующий гироскоп, который служит для определения интеграла от воздействующей на него величины. Различают Г. и. угловой скорости и Г. и. линейных ускорений. Г. и. угловой скорости служит для определения угла поворота объекта. Наиболее совершенным является поплавковый Г. и. (рис. 1). Ротор 1 гироскопа установлен в рамке 2, представляющей собой поплавок цилиндрической формы; ось Oy (Oh) вращения поплавка установлена в подшипниках, расположенных в корпусе 4 прибора, имеющего также цилиндрическую форму. Зазор 5 между поплавком и корпусом, а также всё свободное пространство внутри корпуса заполнено жидкостью с большой плотностью. Указанная система образует жидкостный подвес. Подъёмная сила жидкости должна б ыть равна весу гироузла; при этом подшипники 3 подвеса оказываются практически полностью разгруженными; жидкость в зазоре между цилиндрическими поверхностями поплавка и корпуса прибора обеспечивает демпфирование, момент которого пропорционален угловой скорости вращения поплавка. Применение жидкостного подвеса частично предохраняет ось подвеса (ось вращения поплавка) от воздействия на неё вибраций, ударов и др. В приборе предусмотрено автоматическое регулирование температуры, что необходимо для поддержания постоянства плотности и вязкости жидкости, а также постоянства положения центра тяжести поплавкового гироузла и центра давления жидкости относительно оси вращения гироузла. При повороте объекта вокруг оси Oz, (входная ось или ось чувствительности) с угловой скоростью wz возникает гироскопический момент Hwz, где Н — кинетическ ий момент гироскопа, вызывающий вращение поплавка (рамки) вокруг оси Oh (выходная ось) с угловой скоростью b (где b — угол поворота поплавка). При этом на поплавок начинает действовать момент демпфирования bb (b — коэффициент демпфирования), уравновешивающий гироскопический момент. Равенство bb=Hwz после интегрирования даёт bb=Ha, что позволяет по углу b поворота поплавка вокруг оси Oh, снимаемого с датчика 6, определять искомый угол поворота a объекта вокруг оси Oz. Поплавковый Г. и. является прецизионным прибором. Основные достоинства двухстепенных поплавковых Г. и. состоят в высокой точности (собственный уход — десятые и сотые доли градуса в 1 ч); малой подверженности вибрационным, ударным и др. возмущающим воздействиям; возможности использования для решения широкого класса задач, возлагаемых на гироскопические устройства. Поплавковые Г. и. применяются в гироскопах направления, гировертикалях, системах гироскопической стабилизации, используемых на различных летательных аппаратах и кораблях. Г. и. линейных ускорений служит для определения составляющей линейной скорости центра тяжести объекта вдоль заданного направления. Г. и. представляет собой гироскоп с тремя степенями свободы, центр тяжести которого смещен относительно точки подвеса. Вследствие этого Г. и. чувствителен к поступательным ускорениям объекта, т.к. возникающий при этом момент сил инерции выз ывает прецессию гироскопа с угловой скоростью, пропорциональной указанному моменту, т. е. величине ускорения объекта. Тогда угол прецессии будет пропорционален линейной скорости объекта, что позволяет, измерив этот угол, найти искомую скорость. Г. и. реагирует на кажущееся ускорение объекта, т. е. на разность между абсолютным ускорением объекта и гравитационным ускорением (ускорением силы тяготения). Вследствие этого показания прибора пропорциональны интегралу от кажущегося ускорения, т. е. кажущейся скорости. На рис. 2 приведена принципиальная схема Г. и. с трёхстепенным неуравновешенным (тяжёлым) гироскопом гиромаятникового типа. Ротор 1, установленный в гирокамере 2, статически неуравновешен относительно оси качания O'x' в наружном кардановом кольце (рамке) 3; относительно оси Oh (Оу) вращения рамки система полностью уравновешена. Для обеспечения перпендикулярности оси Oz гироскопа к оси Oh (Оу) служит система коррекции, состоящая из контактного приспособления 4 и управляемого им стабилизирующего двигателя 5. Г. и. реагирует на составляющую w линейного ускорения объекта вдоль оси Oh. Показания Г. и. (величина линейной скорости объекта), пропорциональные углу a поворота рамки 3, снимаются с потенциометра 6. Если ось Oh (Оу), совпадающая с продольной осью объекта, горизонтальна, то из формулы для угловой скорости прецессии наружной рамки после интегрирования получается
где v0 — начальная скорость вдоль оси Oh, Н— кинетический момент гироскопа; т — масса ротора и гирокамеры; < i>1 — смещение вдоль оси Oz центра тяжести ротора и гирокамеры относительно точки подвеса; v — искомая составляющая скорости объекта вдоль оси Oh, которая и определяется по значению угла, снимаемого с потенциометра 6. Если объект движется под углом к плоскости горизонта (в частности, вертикально), то для определения скорости v объекта из угла a следует вычесть тот угол, на который повернётся рамка под действием силы тяготения. Г. и. линейных ускорений применяются главным образом в ракетной технике. Возможно применение Г. и. в гироинерциальной вертикали (см. Гировертикаль), где он заменяет акселерометр и интегратор. А. Ю. Ишлинский, С. С. Ривкин. 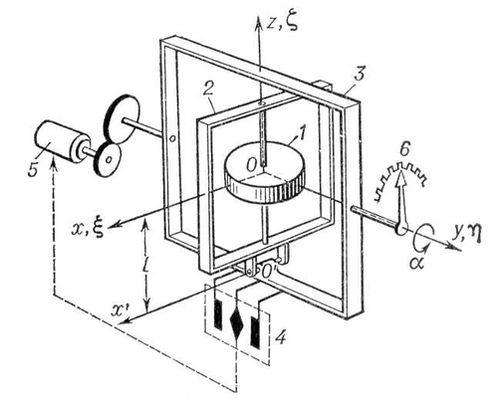 Рис. 2. Принципиальная схема гироскопического интегратора линейных ускорений: 1 — ротор; 2 — гирокамера; 3 — наружное карданово кольцо (рамка); 4 — контактное приспособление; 5 — стабилизирующий двигатель; 6 — потенциометр; Oxhz — оси системы отсчёта; Oxyz — оси, связанные с гирокамерой. 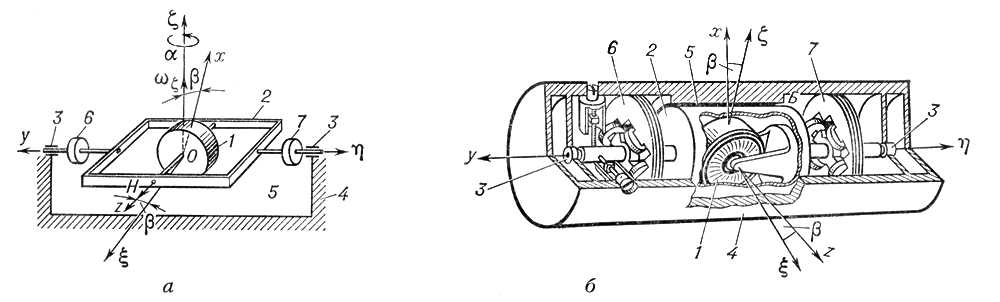 Рис. 1. Схема поплавкового гироскопического интегратора: а — упрощенная принципиальная; б — кинематическая; 1 — ротор; 2 — рамка (поплавок); 3 — подшипники; 4 — корпус прибора; 5 — зазор между корпусом и поплавком; 6 — датчик угла; 7 — датчик моментов; Охуz — оси, связанные с рамкой (поплавком); Oxhz — оси системы отсчёта. |